
{kind=link}
About six months in the past, we confirmed tips on how to create a customized wrapper to acquire uncertainty estimates from a Keras community. As we speak we current a much less laborious, as nicely faster-running method utilizing tfprobability, the R wrapper to TensorFlow Chance. Like most posts on this weblog, this one gained’t be brief, so let’s shortly state what you’ll be able to anticipate in return of studying time.
What to anticipate from this put up
Ranging from what not to anticipate: There gained’t be a recipe that tells you ways precisely to set all parameters concerned with a view to report the “proper” uncertainty measures. However then, what are the “proper” uncertainty measures? Until you occur to work with a technique that has no (hyper-)parameters to tweak, there’ll all the time be questions on tips on how to report uncertainty.
What you can anticipate, although, is an introduction to acquiring uncertainty estimates for Keras networks, in addition to an empirical report of how tweaking (hyper-)parameters could have an effect on the outcomes. As within the aforementioned put up, we carry out our exams on each a simulated and an actual dataset, the Mixed Cycle Energy Plant Knowledge Set. On the finish, rather than strict guidelines, you must have acquired some instinct that can switch to different real-world datasets.
Did you discover our speaking about Keras networks above? Certainly this put up has an extra aim: To date, we haven’t actually mentioned but how tfprobability goes along with keras. Now we lastly do (in brief: they work collectively seemlessly).
Lastly, the notions of aleatoric and epistemic uncertainty, which can have stayed a bit summary within the prior put up, ought to get far more concrete right here.
Aleatoric vs. epistemic uncertainty
Reminiscent by some means of the traditional decomposition of generalization error into bias and variance, splitting uncertainty into its epistemic and aleatoric constituents separates an irreducible from a reducible half.
The reducible half pertains to imperfection within the mannequin: In idea, if our mannequin have been excellent, epistemic uncertainty would vanish. Put in another way, if the coaching information have been limitless – or in the event that they comprised the entire inhabitants – we may simply add capability to the mannequin till we’ve obtained an ideal match.
In distinction, usually there’s variation in our measurements. There could also be one true course of that determines my resting coronary heart price; nonetheless, precise measurements will fluctuate over time. There’s nothing to be achieved about this: That is the aleatoric half that simply stays, to be factored into our expectations.
Now studying this, you may be pondering: “Wouldn’t a mannequin that truly have been excellent seize these pseudo-random fluctuations?”. We’ll depart that phisosophical query be; as an alternative, we’ll attempt to illustrate the usefulness of this distinction by instance, in a sensible method. In a nutshell, viewing a mannequin’s aleatoric uncertainty output ought to warning us to think about applicable deviations when making our predictions, whereas inspecting epistemic uncertainty ought to assist us re-think the appropriateness of the chosen mannequin.
Now let’s dive in and see how we could accomplish our aim with tfprobability. We begin with the simulated dataset.
Uncertainty estimates on simulated information
Dataset
We re-use the dataset from the Google TensorFlow Chance workforce’s weblog put up on the identical topic , with one exception: We prolong the vary of the unbiased variable a bit on the adverse facet, to raised exhibit the completely different strategies’ behaviors.
Right here is the data-generating course of. We additionally get library loading out of the best way. Just like the previous posts on tfprobability, this one too options just lately added performance, so please use the event variations of tensorflow and tfprobability in addition to keras. Name install_tensorflow(model = "nightly") to acquire a present nightly construct of TensorFlow and TensorFlow Chance:
# make sure that we use the event variations of tensorflow, tfprobability and keras
devtools::install_github("rstudio/tensorflow")
devtools::install_github("rstudio/tfprobability")
devtools::install_github("rstudio/keras")
# and that we use a nightly construct of TensorFlow and TensorFlow Chance
tensorflow::install_tensorflow(model = "nightly")
library(tensorflow)
library(tfprobability)
library(keras)
library(dplyr)
library(tidyr)
library(ggplot2)
# make sure that this code is appropriate with TensorFlow 2.0
tf$compat$v1$enable_v2_behavior()
# generate the info
x_min <- -40
x_max <- 60
n <- 150
w0 <- 0.125
b0 <- 5
normalize <- perform(x) (x - x_min) / (x_max - x_min)
# coaching information; predictor
x <- x_min + (x_max - x_min) * runif(n) %>% as.matrix()
# coaching information; goal
eps <- rnorm(n) * (3 * (0.25 + (normalize(x)) ^ 2))
y <- (w0 * x * (1 + sin(x)) + b0) + eps
# take a look at information (predictor)
x_test <- seq(x_min, x_max, size.out = n) %>% as.matrix()How does the info look?
ggplot(information.body(x = x, y = y), aes(x, y)) + geom_point()
Determine 1: Simulated information
The duty right here is single-predictor regression, which in precept we are able to obtain use Keras dense layers.
Let’s see tips on how to improve this by indicating uncertainty, ranging from the aleatoric sort.
Aleatoric uncertainty
Aleatoric uncertainty, by definition, isn’t a press release in regards to the mannequin. So why not have the mannequin study the uncertainty inherent within the information?
That is precisely how aleatoric uncertainty is operationalized on this method. As a substitute of a single output per enter – the anticipated imply of the regression – right here we have now two outputs: one for the imply, and one for the usual deviation.
How will we use these? Till shortly, we might have needed to roll our personal logic. Now with tfprobability, we make the community output not tensors, however distributions – put in another way, we make the final layer a distribution layer.
Distribution layers are Keras layers, however contributed by tfprobability. The superior factor is that we are able to practice them with simply tensors as targets, as normal: No have to compute possibilities ourselves.
A number of specialised distribution layers exist, corresponding to layer_kl_divergence_add_loss, layer_independent_bernoulli, or layer_mixture_same_family, however probably the most normal is layer_distribution_lambda. layer_distribution_lambda takes as inputs the previous layer and outputs a distribution. So as to have the ability to do that, we have to inform it tips on how to make use of the previous layer’s activations.
In our case, in some unspecified time in the future we are going to need to have a dense layer with two items.
... %>% layer_dense(items = 2, activation = "linear") %>%Then layer_distribution_lambda will use the primary unit because the imply of a traditional distribution, and the second as its commonplace deviation.
layer_distribution_lambda(perform(x)
tfd_normal(loc = x[, 1, drop = FALSE],
scale = 1e-3 + tf$math$softplus(x[, 2, drop = FALSE])
)
)Right here is the whole mannequin we use. We insert an extra dense layer in entrance, with a relu activation, to provide the mannequin a bit extra freedom and capability. We talk about this, in addition to that scale = ... foo, as quickly as we’ve completed our walkthrough of mannequin coaching.
mannequin <- keras_model_sequential() %>%
layer_dense(items = 8, activation = "relu") %>%
layer_dense(items = 2, activation = "linear") %>%
layer_distribution_lambda(perform(x)
tfd_normal(loc = x[, 1, drop = FALSE],
# ignore on first learn, we'll come again to this
# scale = 1e-3 + 0.05 * tf$math$softplus(x[, 2, drop = FALSE])
scale = 1e-3 + tf$math$softplus(x[, 2, drop = FALSE])
)
)For a mannequin that outputs a distribution, the loss is the adverse log probability given the goal information.
negloglik <- perform(y, mannequin) - (mannequin %>% tfd_log_prob(y))We are able to now compile and match the mannequin.
We now name the mannequin on the take a look at information to acquire the predictions. The predictions now really are distributions, and we have now 150 of them, one for every datapoint:
yhat <- mannequin(tf$fixed(x_test))tfp.distributions.Regular("sequential/distribution_lambda/Regular/",
batch_shape=[150, 1], event_shape=[], dtype=float32)To acquire the means and commonplace deviations – the latter being that measure of aleatoric uncertainty we’re all for – we simply name tfd_mean and tfd_stddev on these distributions.
That may give us the anticipated imply, in addition to the anticipated variance, per datapoint.
Let’s visualize this. Listed below are the precise take a look at information factors, the anticipated means, in addition to confidence bands indicating the imply estimate plus/minus two commonplace deviations.
ggplot(information.body(
x = x,
y = y,
imply = as.numeric(imply),
sd = as.numeric(sd)
),
aes(x, y)) +
geom_point() +
geom_line(aes(x = x_test, y = imply), colour = "violet", measurement = 1.5) +
geom_ribbon(aes(
x = x_test,
ymin = imply - 2 * sd,
ymax = imply + 2 * sd
),
alpha = 0.2,
fill = "gray")
Determine 2: Aleatoric uncertainty on simulated information, utilizing relu activation within the first dense layer.
This seems fairly affordable. What if we had used linear activation within the first layer? Which means, what if the mannequin had regarded like this:
This time, the mannequin doesn’t seize the “type” of the info that nicely, as we’ve disallowed any nonlinearities.

Determine 3: Aleatoric uncertainty on simulated information, utilizing linear activation within the first dense layer.
Utilizing linear activations solely, we additionally have to do extra experimenting with the scale = ... line to get the end result look “proper”. With relu, alternatively, outcomes are fairly strong to modifications in how scale is computed. Which activation can we select? If our aim is to adequately mannequin variation within the information, we are able to simply select relu – and depart assessing uncertainty within the mannequin to a special method (the epistemic uncertainty that’s up subsequent).
Total, it looks like aleatoric uncertainty is the simple half. We wish the community to study the variation inherent within the information, which it does. What can we achieve? As a substitute of acquiring simply level estimates, which on this instance may prove fairly dangerous within the two fan-like areas of the info on the left and proper sides, we study in regards to the unfold as nicely. We’ll thus be appropriately cautious relying on what enter vary we’re making predictions for.
Epistemic uncertainty
Now our focus is on the mannequin. Given a speficic mannequin (e.g., one from the linear household), what sort of information does it say conforms to its expectations?
To reply this query, we make use of a variational-dense layer.
That is once more a Keras layer offered by tfprobability. Internally, it really works by minimizing the proof decrease certain (ELBO), thus striving to search out an approximative posterior that does two issues:
- match the precise information nicely (put in another way: obtain excessive log probability), and
- keep near a prior (as measured by KL divergence).
As customers, we really specify the type of the posterior in addition to that of the prior. Right here is how a previous may look.
prior_trainable <-
perform(kernel_size,
bias_size = 0,
dtype = NULL) {
n <- kernel_size + bias_size
keras_model_sequential() %>%
# we'll touch upon this quickly
# layer_variable(n, dtype = dtype, trainable = FALSE) %>%
layer_variable(n, dtype = dtype, trainable = TRUE) %>%
layer_distribution_lambda(perform(t) {
tfd_independent(tfd_normal(loc = t, scale = 1),
reinterpreted_batch_ndims = 1)
})
}This prior is itself a Keras mannequin, containing a layer that wraps a variable and a layer_distribution_lambda, that sort of distribution-yielding layer we’ve simply encountered above. The variable layer might be mounted (non-trainable) or non-trainable, akin to a real prior or a previous learnt from the info in an empirical Bayes-like method. The distribution layer outputs a traditional distribution since we’re in a regression setting.
The posterior too is a Keras mannequin – undoubtedly trainable this time. It too outputs a traditional distribution:
posterior_mean_field <-
perform(kernel_size,
bias_size = 0,
dtype = NULL) {
n <- kernel_size + bias_size
c <- log(expm1(1))
keras_model_sequential(record(
layer_variable(form = 2 * n, dtype = dtype),
layer_distribution_lambda(
make_distribution_fn = perform(t) {
tfd_independent(tfd_normal(
loc = t[1:n],
scale = 1e-5 + tf$nn$softplus(c + t[(n + 1):(2 * n)])
), reinterpreted_batch_ndims = 1)
}
)
))
}Now that we’ve outlined each, we are able to arrange the mannequin’s layers. The primary one, a variational-dense layer, has a single unit. The following distribution layer then takes that unit’s output and makes use of it for the imply of a traditional distribution – whereas the size of that Regular is mounted at 1:
You’ll have seen one argument to layer_dense_variational we haven’t mentioned but, kl_weight.
That is used to scale the contribution to the overall lack of the KL divergence, and usually ought to equal one over the variety of information factors.
Coaching the mannequin is simple. As customers, we solely specify the adverse log probability a part of the loss; the KL divergence half is taken care of transparently by the framework.
Due to the stochasticity inherent in a variational-dense layer, every time we name this mannequin, we receive completely different outcomes: completely different regular distributions, on this case.
To acquire the uncertainty estimates we’re in search of, we due to this fact name the mannequin a bunch of instances – 100, say:
yhats <- purrr::map(1:100, perform(x) mannequin(tf$fixed(x_test)))We are able to now plot these 100 predictions – traces, on this case, as there are not any nonlinearities:
means <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_mean)) %>% abind::abind()
traces <- information.body(cbind(x_test, means)) %>%
collect(key = run, worth = worth,-X1)
imply <- apply(means, 1, imply)
ggplot(information.body(x = x, y = y, imply = as.numeric(imply)), aes(x, y)) +
geom_point() +
geom_line(aes(x = x_test, y = imply), colour = "violet", measurement = 1.5) +
geom_line(
information = traces,
aes(x = X1, y = worth, colour = run),
alpha = 0.3,
measurement = 0.5
) +
theme(legend.place = "none")
Determine 4: Epistemic uncertainty on simulated information, utilizing linear activation within the variational-dense layer.
What we see listed here are primarily completely different fashions, per the assumptions constructed into the structure. What we’re not accounting for is the unfold within the information. Can we do each? We are able to; however first let’s touch upon a couple of selections that have been made and see how they have an effect on the outcomes.
To stop this put up from rising to infinite measurement, we’ve avoided performing a scientific experiment; please take what follows not as generalizable statements, however as tips that could issues you’ll want to bear in mind in your personal ventures. Particularly, every (hyper-)parameter isn’t an island; they might work together in unexpected methods.
After these phrases of warning, listed here are some issues we seen.
- One query you may ask: Earlier than, within the aleatoric uncertainty setup, we added an extra dense layer to the mannequin, with
reluactivation. What if we did this right here?
Firstly, we’re not including any extra, non-variational layers with a view to preserve the setup “absolutely Bayesian” – we wish priors at each degree. As to utilizingreluinlayer_dense_variational, we did strive that, and the outcomes look fairly related:

Determine 5: Epistemic uncertainty on simulated information, utilizing relu activation within the variational-dense layer.
Nevertheless, issues look fairly completely different if we drastically cut back coaching time… which brings us to the subsequent statement.
- Not like within the aleatoric setup, the variety of coaching epochs matter loads. If we practice, quote unquote, too lengthy, the posterior estimates will get nearer and nearer to the posterior imply: we lose uncertainty. What occurs if we practice “too brief” is much more notable. Listed below are the outcomes for the linear-activation in addition to the relu-activation instances:

Determine 6: Epistemic uncertainty on simulated information if we practice for 100 epochs solely. Left: linear activation. Proper: relu activation.
Apparently, each mannequin households look very completely different now, and whereas the linear-activation household seems extra affordable at first, it nonetheless considers an total adverse slope per the info.
So what number of epochs are “lengthy sufficient”? From statement, we’d say {that a} working heuristic ought to most likely be primarily based on the speed of loss discount. However definitely, it’ll make sense to strive completely different numbers of epochs and test the impact on mannequin conduct. As an apart, monitoring estimates over coaching time could even yield necessary insights into the assumptions constructed right into a mannequin (e.g., the impact of various activation features).
-
As necessary because the variety of epochs skilled, and related in impact, is the studying price. If we substitute the educational price on this setup by
0.001, outcomes will look just like what we noticed above for theepochs = 100case. Once more, we are going to need to strive completely different studying charges and ensure we practice the mannequin “to completion” in some affordable sense. -
To conclude this part, let’s shortly have a look at what occurs if we fluctuate two different parameters. What if the prior have been non-trainable (see the commented line above)? And what if we scaled the significance of the KL divergence (
kl_weightinlayer_dense_variational’s argument record) in another way, changingkl_weight = 1/nbykl_weight = 1(or equivalently, eradicating it)? Listed below are the respective outcomes for an otherwise-default setup. They don’t lend themselves to generalization – on completely different (e.g., larger!) datasets the outcomes will most definitely look completely different – however undoubtedly fascinating to look at.
Determine 7: Epistemic uncertainty on simulated information. Left: kl_weight = 1. Proper: prior non-trainable.
Now let’s come again to the query: We’ve modeled unfold within the information, we’ve peeked into the center of the mannequin, – can we do each on the identical time?
We are able to, if we mix each approaches. We add an extra unit to the variational-dense layer and use this to study the variance: as soon as for every “sub-model” contained within the mannequin.
Combining each aleatoric and epistemic uncertainty
Reusing the prior and posterior from above, that is how the ultimate mannequin seems:
mannequin <- keras_model_sequential() %>%
layer_dense_variational(
items = 2,
make_posterior_fn = posterior_mean_field,
make_prior_fn = prior_trainable,
kl_weight = 1 / n
) %>%
layer_distribution_lambda(perform(x)
tfd_normal(loc = x[, 1, drop = FALSE],
scale = 1e-3 + tf$math$softplus(0.01 * x[, 2, drop = FALSE])
)
)We practice this mannequin similar to the epistemic-uncertainty just one. We then receive a measure of uncertainty per predicted line. Or within the phrases we used above, we now have an ensemble of fashions every with its personal indication of unfold within the information. Here’s a method we may show this – every coloured line is the imply of a distribution, surrounded by a confidence band indicating +/- two commonplace deviations.
yhats <- purrr::map(1:100, perform(x) mannequin(tf$fixed(x_test)))
means <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_mean)) %>% abind::abind()
sds <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_stddev)) %>% abind::abind()
means_gathered <- information.body(cbind(x_test, means)) %>%
collect(key = run, worth = mean_val,-X1)
sds_gathered <- information.body(cbind(x_test, sds)) %>%
collect(key = run, worth = sd_val,-X1)
traces <-
means_gathered %>% inner_join(sds_gathered, by = c("X1", "run"))
imply <- apply(means, 1, imply)
ggplot(information.body(x = x, y = y, imply = as.numeric(imply)), aes(x, y)) +
geom_point() +
theme(legend.place = "none") +
geom_line(aes(x = x_test, y = imply), colour = "violet", measurement = 1.5) +
geom_line(
information = traces,
aes(x = X1, y = mean_val, colour = run),
alpha = 0.6,
measurement = 0.5
) +
geom_ribbon(
information = traces,
aes(
x = X1,
ymin = mean_val - 2 * sd_val,
ymax = mean_val + 2 * sd_val,
group = run
),
alpha = 0.05,
fill = "gray",
inherit.aes = FALSE
)
Determine 8: Displaying each epistemic and aleatoric uncertainty on the simulated dataset.
Good! This seems like one thing we may report.
As you may think, this mannequin, too, is delicate to how lengthy (assume: variety of epochs) or how briskly (assume: studying price) we practice it. And in comparison with the epistemic-uncertainty solely mannequin, there’s an extra option to be made right here: the scaling of the earlier layer’s activation – the 0.01 within the scale argument to tfd_normal:
scale = 1e-3 + tf$math$softplus(0.01 * x[, 2, drop = FALSE])Protecting all the pieces else fixed, right here we fluctuate that parameter between 0.01 and 0.05:

Determine 9: Epistemic plus aleatoric uncertainty on the simulated dataset: Various the size argument.
Evidently, that is one other parameter we needs to be ready to experiment with.
Now that we’ve launched all three forms of presenting uncertainty – aleatoric solely, epistemic solely, or each – let’s see them on the aforementioned Mixed Cycle Energy Plant Knowledge Set. Please see our earlier put up on uncertainty for a fast characterization, in addition to visualization, of the dataset.
Mixed Cycle Energy Plant Knowledge Set
To maintain this put up at a digestible size, we’ll chorus from attempting as many options as with the simulated information and primarily stick with what labored nicely there. This also needs to give us an thought of how nicely these “defaults” generalize. We individually examine two situations: The only-predictor setup (utilizing every of the 4 out there predictors alone), and the whole one (utilizing all 4 predictors directly).
The dataset is loaded simply as within the earlier put up.
First we have a look at the single-predictor case, ranging from aleatoric uncertainty.
Single predictor: Aleatoric uncertainty
Right here is the “default” aleatoric mannequin once more. We additionally duplicate the plotting code right here for the reader’s comfort.
n <- nrow(X_train) # 7654
n_epochs <- 10 # we'd like fewer epochs as a result of the dataset is a lot larger
batch_size <- 100
learning_rate <- 0.01
# variable to suit - change to 2,3,4 to get the opposite predictors
i <- 1
mannequin <- keras_model_sequential() %>%
layer_dense(items = 16, activation = "relu") %>%
layer_dense(items = 2, activation = "linear") %>%
layer_distribution_lambda(perform(x)
tfd_normal(loc = x[, 1, drop = FALSE],
scale = tf$math$softplus(x[, 2, drop = FALSE])
)
)
negloglik <- perform(y, mannequin) - (mannequin %>% tfd_log_prob(y))
mannequin %>% compile(optimizer = optimizer_adam(lr = learning_rate), loss = negloglik)
hist <-
mannequin %>% match(
X_train[, i, drop = FALSE],
y_train,
validation_data = record(X_val[, i, drop = FALSE], y_val),
epochs = n_epochs,
batch_size = batch_size
)
yhat <- mannequin(tf$fixed(X_val[, i, drop = FALSE]))
imply <- yhat %>% tfd_mean()
sd <- yhat %>% tfd_stddev()
ggplot(information.body(
x = X_val[, i],
y = y_val,
imply = as.numeric(imply),
sd = as.numeric(sd)
),
aes(x, y)) +
geom_point() +
geom_line(aes(x = x, y = imply), colour = "violet", measurement = 1.5) +
geom_ribbon(aes(
x = x,
ymin = imply - 2 * sd,
ymax = imply + 2 * sd
),
alpha = 0.4,
fill = "gray")How nicely does this work?

Determine 10: Aleatoric uncertainty on the Mixed Cycle Energy Plant Knowledge Set; single predictors.
This seems fairly good we’d say! How about epistemic uncertainty?
Single predictor: Epistemic uncertainty
Right here’s the code:
posterior_mean_field <-
perform(kernel_size,
bias_size = 0,
dtype = NULL) {
n <- kernel_size + bias_size
c <- log(expm1(1))
keras_model_sequential(record(
layer_variable(form = 2 * n, dtype = dtype),
layer_distribution_lambda(
make_distribution_fn = perform(t) {
tfd_independent(tfd_normal(
loc = t[1:n],
scale = 1e-5 + tf$nn$softplus(c + t[(n + 1):(2 * n)])
), reinterpreted_batch_ndims = 1)
}
)
))
}
prior_trainable <-
perform(kernel_size,
bias_size = 0,
dtype = NULL) {
n <- kernel_size + bias_size
keras_model_sequential() %>%
layer_variable(n, dtype = dtype, trainable = TRUE) %>%
layer_distribution_lambda(perform(t) {
tfd_independent(tfd_normal(loc = t, scale = 1),
reinterpreted_batch_ndims = 1)
})
}
mannequin <- keras_model_sequential() %>%
layer_dense_variational(
items = 1,
make_posterior_fn = posterior_mean_field,
make_prior_fn = prior_trainable,
kl_weight = 1 / n,
activation = "linear",
) %>%
layer_distribution_lambda(perform(x)
tfd_normal(loc = x, scale = 1))
negloglik <- perform(y, mannequin) - (mannequin %>% tfd_log_prob(y))
mannequin %>% compile(optimizer = optimizer_adam(lr = learning_rate), loss = negloglik)
hist <-
mannequin %>% match(
X_train[, i, drop = FALSE],
y_train,
validation_data = record(X_val[, i, drop = FALSE], y_val),
epochs = n_epochs,
batch_size = batch_size
)
yhats <- purrr::map(1:100, perform(x)
yhat <- mannequin(tf$fixed(X_val[, i, drop = FALSE])))
means <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_mean)) %>% abind::abind()
traces <- information.body(cbind(X_val[, i], means)) %>%
collect(key = run, worth = worth,-X1)
imply <- apply(means, 1, imply)
ggplot(information.body(x = X_val[, i], y = y_val, imply = as.numeric(imply)), aes(x, y)) +
geom_point() +
geom_line(aes(x = X_val[, i], y = imply), colour = "violet", measurement = 1.5) +
geom_line(
information = traces,
aes(x = X1, y = worth, colour = run),
alpha = 0.3,
measurement = 0.5
) +
theme(legend.place = "none")And that is the end result.

Determine 11: Epistemic uncertainty on the Mixed Cycle Energy Plant Knowledge Set; single predictors.
As with the simulated information, the linear fashions appears to “do the proper factor”. And right here too, we predict we are going to need to increase this with the unfold within the information: Thus, on to method three.
Single predictor: Combining each varieties
Right here we go. Once more, posterior_mean_field and prior_trainable look similar to within the epistemic-only case.
mannequin <- keras_model_sequential() %>%
layer_dense_variational(
items = 2,
make_posterior_fn = posterior_mean_field,
make_prior_fn = prior_trainable,
kl_weight = 1 / n,
activation = "linear"
) %>%
layer_distribution_lambda(perform(x)
tfd_normal(loc = x[, 1, drop = FALSE],
scale = 1e-3 + tf$math$softplus(0.01 * x[, 2, drop = FALSE])))
negloglik <- perform(y, mannequin)
- (mannequin %>% tfd_log_prob(y))
mannequin %>% compile(optimizer = optimizer_adam(lr = learning_rate), loss = negloglik)
hist <-
mannequin %>% match(
X_train[, i, drop = FALSE],
y_train,
validation_data = record(X_val[, i, drop = FALSE], y_val),
epochs = n_epochs,
batch_size = batch_size
)
yhats <- purrr::map(1:100, perform(x)
mannequin(tf$fixed(X_val[, i, drop = FALSE])))
means <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_mean)) %>% abind::abind()
sds <-
purrr::map(yhats, purrr::compose(as.matrix, tfd_stddev)) %>% abind::abind()
means_gathered <- information.body(cbind(X_val[, i], means)) %>%
collect(key = run, worth = mean_val,-X1)
sds_gathered <- information.body(cbind(X_val[, i], sds)) %>%
collect(key = run, worth = sd_val,-X1)
traces <-
means_gathered %>% inner_join(sds_gathered, by = c("X1", "run"))
imply <- apply(means, 1, imply)
#traces <- traces %>% filter(run=="X3" | run =="X4")
ggplot(information.body(x = X_val[, i], y = y_val, imply = as.numeric(imply)), aes(x, y)) +
geom_point() +
theme(legend.place = "none") +
geom_line(aes(x = X_val[, i], y = imply), colour = "violet", measurement = 1.5) +
geom_line(
information = traces,
aes(x = X1, y = mean_val, colour = run),
alpha = 0.2,
measurement = 0.5
) +
geom_ribbon(
information = traces,
aes(
x = X1,
ymin = mean_val - 2 * sd_val,
ymax = mean_val + 2 * sd_val,
group = run
),
alpha = 0.01,
fill = "gray",
inherit.aes = FALSE
)And the output?

Determine 12: Mixed uncertainty on the Mixed Cycle Energy Plant Knowledge Set; single predictors.
This seems helpful! Let’s wrap up with our closing take a look at case: Utilizing all 4 predictors collectively.
All predictors
The coaching code used on this situation seems similar to earlier than, aside from our feeding all predictors to the mannequin. For plotting, we resort to displaying the primary principal part on the x-axis – this makes the plots look noisier than earlier than. We additionally show fewer traces for the epistemic and epistemic-plus-aleatoric instances (20 as an alternative of 100). Listed below are the outcomes:

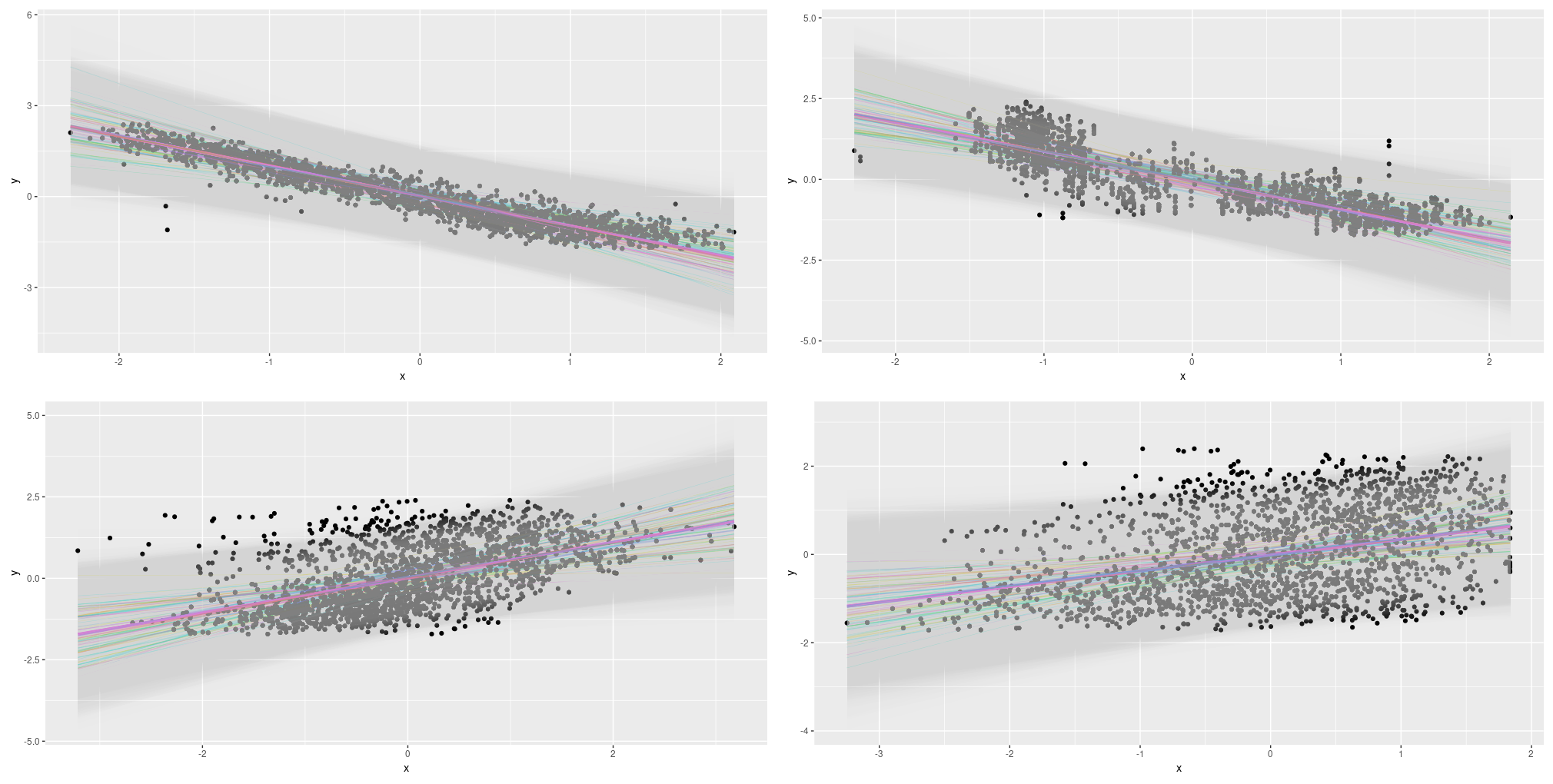
Determine 13: Uncertainty (aleatoric, epistemic, each) on the Mixed Cycle Energy Plant Knowledge Set; all predictors.
Conclusion
The place does this depart us? In comparison with the learnable-dropout method described within the prior put up, the best way introduced here’s a lot simpler, sooner, and extra intuitively comprehensible.
The strategies per se are that simple to make use of that on this first introductory put up, we may afford to discover options already: one thing we had no time to do in that earlier exposition.
In reality, we hope this put up leaves you able to do your personal experiments, by yourself information.
Clearly, you’ll have to make choices, however isn’t that the best way it’s in information science? There’s no method round making choices; we simply needs to be ready to justify them …
Thanks for studying!