

{kind=link}
CMU’s Autonomous Exploration Analysis Staff has developed a set of robotic programs and planners enabling robots to discover extra shortly, probe the darkest corners of unknown environments, and create extra correct and detailed maps — all with out human assist.
By Aaron Aupperlee
A analysis group in Carnegie Mellon College’s Robotics Institute is creating the following era of explorers — robots.
The Autonomous Exploration Analysis Staff has developed a set of robotic programs and planners enabling robots to discover extra shortly, probe the darkest corners of unknown environments, and create extra correct and detailed maps. The programs permit robots to do all this autonomously, discovering their approach and making a map with out human intervention.
“You possibly can set it in any atmosphere, like a division retailer or a residential constructing after a catastrophe, and off it goes,” stated Ji Zhang, a programs scientist within the Robotics Institute. “It builds the map in real-time, and whereas it explores, it figures out the place it needs to go subsequent. You possibly can see every little thing on the map. You don’t even need to step into the house. Simply let the robots discover and map the atmosphere.”
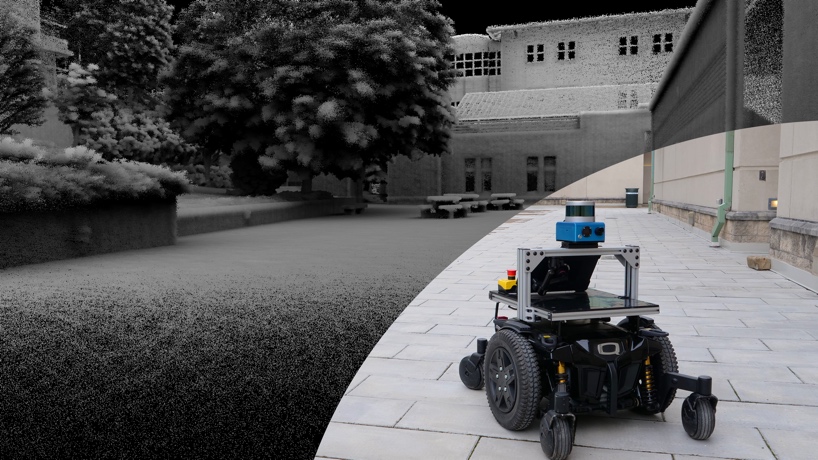
The crew has labored on exploration programs for greater than three years. They’ve explored and mapped a number of underground mines, a parking storage, the Cohon College Heart, and several other different indoor and out of doors places on the CMU campus. The system’s computer systems and sensors might be hooked up to just about any robotic platform, reworking it right into a modern-day explorer. The group makes use of a modified motorized wheelchair and drones for a lot of its testing.
Robots can discover in three modes utilizing the group’s programs. In a single mode, an individual can management the robotic’s actions and course whereas autonomous programs preserve it from crashing into partitions, ceilings or different objects. In one other mode, an individual can choose some extent on a map and the robotic will navigate to that time. The third mode is pure exploration. The robotic units off by itself, investigates all the house and creates a map.
“It is a very versatile system to make use of in lots of functions, from supply to search-and-rescue,” stated Howie Choset, a professor within the Robotics Institute.
The group mixed a 3D scanning lidar sensor, forward-looking digital camera and inertial measurement unit sensors with an exploration algorithm to allow the robotic to know the place it’s, the place it has been and the place it ought to go subsequent. The ensuing programs are considerably extra environment friendly than earlier approaches, creating extra full maps whereas lowering the algorithm run time by half.
The brand new programs work in low-light, treacherous situations the place communication is spotty, like caves, tunnels and deserted constructions. A model of the group’s exploration system powered Staff Explorer, an entry from CMU and Oregon State College in DARPA’s Subterranean Problem. Staff Explorer positioned fourth within the last competitors however received the Most Sectors Explored Award for mapping extra of the route than some other crew.
“All of our work is open-sourced. We aren’t holding something again. We need to strengthen society with the capabilities of constructing autonomous exploration robots,” stated Chao Cao, a Ph.D. scholar in robotics and the lead operator for Staff Explorer. “It’s a elementary functionality. After you have it, you are able to do much more.”
The group’s most up-to-date work appeared in Science Robotics, which printed “Illustration Granularity Allows Time-Environment friendly Autonomous Exploration in Massive, Advanced Worlds” on-line. Previous work has acquired prime awards at prestigious robotics conferences. “TARE: A Hierarchical Framework for Effectively Exploring Advanced 3D Environments” received the Greatest Paper and Greatest Programs Paper awards on the Robotics Science and Programs Convention in 2021. It was the primary time within the convention’s historical past {that a} paper acquired each awards. “FAR Planner: Quick, Attemptable Route Planner Utilizing Dynamic Visibility Replace” received the Greatest Pupil Paper Award on the Worldwide Convention on Clever Robots and Programs in 2022.
Extra info is offered on the group’s web site.

Carnegie Mellon College