

{kind=link}
Whereas there are a variety of optical programs that present robotic arms with a way of contact, most of these programs are flat, in order that they’re confined to the fingertips. A brand new MIT system, nevertheless, works alongside the complete size of every finger.
Often called GelSight Svelte, the setup builds upon MIT’s current GelSight expertise.
Within the latter system, a slab of clear silicone is coated on one aspect with a layer of opaque metallic paint. When the painted aspect is pressed in opposition to a floor, it deforms to the form of that floor. Trying by way of the alternative, unpainted aspect of the silicone, one can see the minute contours of the floor, urgent up into the paint.
Utilizing a digicam and laptop algorithms, the system is ready to flip these contours into 3D photos that seize particulars lower than one micrometer in depth and roughly two micrometers in width. These visible particulars are transformed into the equal of strain factors that will be felt by our nerves.
MIT initially integrated a GelSight sensor into one finger pad of a robotic gripper, permitting the system to “really feel” cables that it was greedy. Within the subsequent GelSight EndoFlex hand, which may establish three-dimensional objects by feeling their form, two of the sensors have been constructed into every of the three fingers (for a complete of six for the entire hand).
GelSight Svelte likewise extends the sensing capabilities past the finger pads, however in a a lot sleeker and extra environment friendly type. It has already been built-in right into a three-fingered robotic hand.
MIT
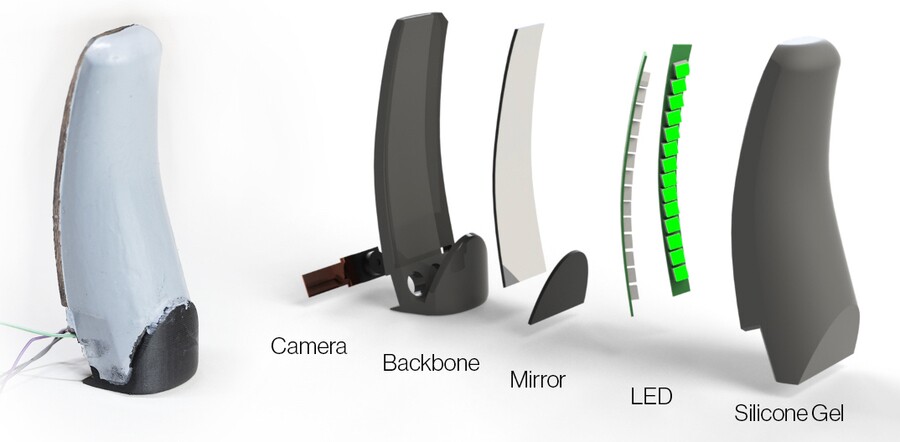
Every finger of that hand accommodates only a single inside digicam, situated on the base of the digit. There are additionally two rows of inside LEDs (one greed, one purple) working alongside the size of the finger, plus there are two mirrors – one lengthy curved mirror runs the size of the finger, and a shorter flat mirror sits angled beneath the digicam.
By wanting down into the flat mirror, the digicam can see the reflection of the complete curved mirror, thus seeing all the finger-surface deformations which can be being mirrored by it. What’s extra, by analyzing the inexperienced and purple mild saturation of every deformation, it is doable to find out the quantity of strain that the underlying floor is making use of to the silicone.
Moreover, GelSight Svelte repeatedly screens the curvature of every finger through sensors in a versatile spine that runs alongside the again of the digit. The system is aware of that the extra the finger curves, the larger the strain it is putting on the item that it is holding.
“As a result of our new sensor is human-finger-shaped, we will use it to do various kinds of grasps for various duties, as a substitute of utilizing pinch grasps for every thing,” stated Alan (Jialiang) Zhao, a mechanical engineering graduate scholar and lead writer of a paper on the analysis. “There’s solely a lot you are able to do with a parallel jaw gripper. Our sensor actually opens up some new potentialities on totally different manipulation duties we may do with robots.”
You possibly can see the hand in motion, within the video beneath.
GelSight Svelte: Lengthy, Curved, Human Finger-shaped Single-camera Tactile Robotic Finger
Supply: MIT