
{kind=link}
|
Hearken to this text  |
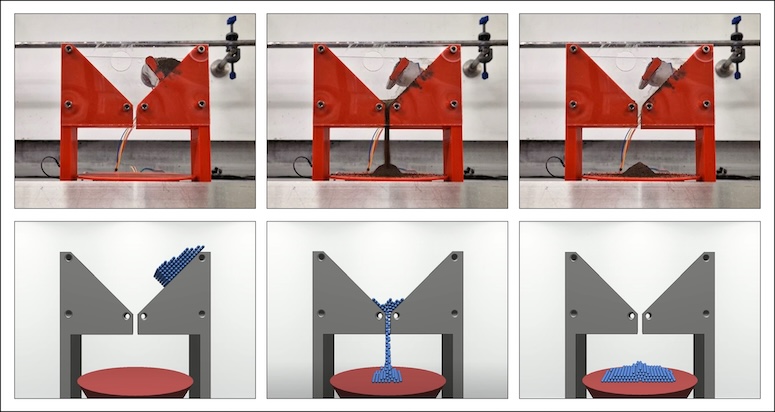
The identical experiments have been arrange in, each, simulation and actuality to see if the digital regolith behaved realistically. This take a look at checked out how small (16 g) samples of fabric flowed by way of slender funnels. | Credit score: Joe Louca
Researchers declare a brand new laptop mannequin mimics Moon mud so properly that it might result in smoother and safer Lunar robotic teleoperations. The device, developed by researchers on the College of Bristol and primarily based on the Bristol Robotics Laboratory, could possibly be used to coach astronauts forward of Lunar missions.
Working with their trade companion, Thales Alenia House within the UK, who has particular curiosity in creating working robotic techniques for area purposes, the group investigated a digital model of regolith, one other title for Moon mud.
Lunar regolith is of specific curiosity for the upcoming Lunar exploration missions deliberate over the subsequent decade. From it, scientists can probably extract worthwhile assets corresponding to oxygen, rocket gas or building supplies, to help a long-term presence on the Moon.
To gather regolith, remotely operated robots emerge as a sensible selection as a consequence of their decrease dangers and prices in comparison with human spaceflight. Nonetheless, working robots over these giant distances introduces giant delays into the system, which make them tougher to regulate.
Now that the group know this simulation behaves equally to actuality, they will use it to reflect working a robotic on the Moon. This strategy permits operators to regulate the robotic with out delays, offering a smoother and extra environment friendly expertise. You study extra by studying the technical paper right here.
Lead writer Joe Louca, primarily based in Bristol’s Faculty of Engineering Arithmetic and Know-how defined: “Consider it like a sensible online game set on the Moon – we need to be sure the digital model of moon mud behaves similar to the precise factor, in order that if we’re utilizing it to regulate a robotic on the Moon, then it should behave as we anticipate.
“This mannequin is correct, scalable, and light-weight, so can be utilized to help upcoming lunar exploration missions.”
This research adopted from earlier work of the group, which discovered that skilled robotic operators need to prepare on their techniques with progressively rising danger and realism. Meaning beginning in a simulation and constructing as much as utilizing bodily mock-ups, earlier than transferring on to utilizing the precise system. An correct simulation mannequin is essential for coaching and creating the operator’s belief within the system.
Whereas some particularly correct fashions of Moon mud had beforehand been developed, these are so detailed that they require quite a lot of computational time, making them too gradual to regulate a robotic easily. Researchers from DLR (German Aerospace Centre) tackled this problem by creating a digital mannequin of regolith that considers its density, stickiness, and friction, in addition to the Moon’s decreased gravity. Their mannequin is of curiosity for the area trade as it’s mild on computational assets, and, therefore, will be run in real-time. Nonetheless, it really works greatest with small portions of Moon mud.
The Bristol group’s goals have been to, firstly, lengthen the mannequin so it will possibly deal with extra regolith, whereas staying light-weight sufficient to run in real-time, after which to confirm it experimentally.
Joe Louca added: “Our major focus all through this mission was on enhancing the consumer expertise for operators of those techniques – how might we make their job simpler?
“We started with the unique digital regolith mannequin developed by DLR, and modified it to make it extra scalable.
“Then, we performed a sequence of experiments – half in a simulated setting, half in the actual world – to measure whether or not the digital moon mud behaved the identical as its real-world counterpart.”
As this mannequin of regolith is promising for being correct, scalable and light-weight sufficient for use in real-time, the group will subsequent examine whether or not it may be used when working robots to gather regolith.
In addition they plan to research whether or not an identical system could possibly be developed to simulate Martian soil, which could possibly be of profit for future exploration missions, or to coach scientists to deal with materials from the extremely anticipated Mars Pattern Return mission.
Editor’s Observe: This text was republished from the College of Bristol.