
{kind=link}
Robotic sponge. Picture credit score: Tianqi Yue
This easy-to-make sponge-jamming system can assist stiff robots deal with delicate gadgets fastidiously by mimicking the nuanced contact, or variable stiffness, of a human.
Robots can skip, soar and do somersaults, however they’re too inflexible to carry an egg simply. Variable-stiffness units are potential options for contact compliance on laborious robots to scale back injury, or for enhancing the load capability of soppy robots.
This research, revealed on the IEEE Worldwide Convention on Robotics and Automation (ICRA) 2023, exhibits that variable stiffness might be achieved by a silicone sponge.
Lead writer Tianqi Yue from Bristol’s Division of Engineering Arithmetic defined: “Stiffness, also called softness, is necessary involved eventualities.
“Robotic arms are too inflexible so they can not make such a tender human-like grasp on delicate objects, for instance, an egg.
“What makes people totally different from robotic arms is that now we have tender tissues enclosing inflexible bones, which act as a pure mitigating mechanism.
“On this paper, we managed to develop a tender system with variable stiffness, to be mounted on the top robotic arm for making the robot-object contact protected.”
Robotic sponge in motion. Video Credit score: Tianqi Yue.
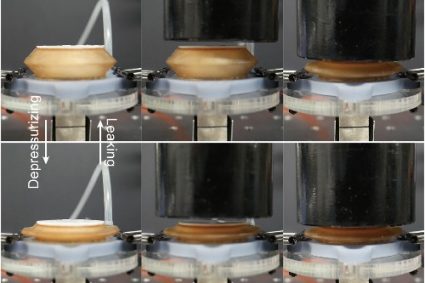
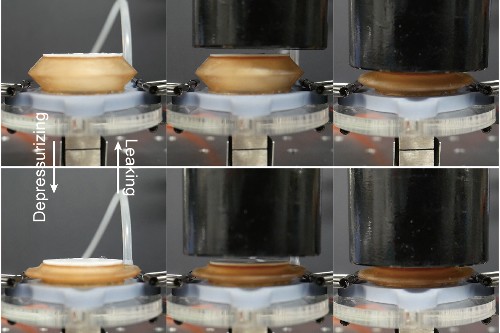
Silicone sponge is an inexpensive and easy-to-fabricate materials. It’s a porous elastomer identical to the cleansing sponge utilized in on a regular basis duties.
By squeezing the sponge, the sponge stiffens which is why it may be reworked right into a variable-stiffness system.
This system might be utilized in industrial robots in eventualities together with gripping jellies, eggs and different fragile substances. It may also be utilized in service robots to make human-robot interplay safer.
Mr Yue added: “We managed to make use of a sponge to make an inexpensive and nimble however efficient system that may assist robots obtain tender contact with objects. The nice potential comes from its low price and lightweight weight.
“We imagine this silicone-sponge primarily based variable-stiffness system will present a novel resolution in business and healthcare, for instance, tunable-stiffness requirement on robotic sprucing and ultrasound imaging.”
The group will now have a look at making the system obtain variable stiffness in a number of instructions, together with rotation.
Paper: “A Silicone-sponge-based Variable-stiffness Machine” by Tianqi Yue on the IEEE Worldwide Convention on Robotics and Automation (ICRA) 2023.

College of Bristol
is likely one of the hottest and profitable universities within the UK.