
Conventional robotic methods have all the time had problem exploring tight or cluttered areas attributable to their measurement and maneuverability limitations. Nonetheless, the event of centimeter-scale robots has opened up new frontiers in exploration, permitting for unprecedented entry to confined areas that bigger robots merely can not navigate. These tiny robots, usually no bigger than a number of centimeters, have nice potential in a wide range of fields and functions, from search and rescue operations to medical procedures and environmental monitoring.

The principle benefit of centimeter-scale robots is that they will entry areas which are too small or complicated for bigger robots. These robots can navigate by means of slender pipelines, examine equipment with intricate elements, or discover collapsed constructions in disaster-stricken areas, offering important insights and data in conditions the place human intervention could also be hazardous or impractical.
Regardless of this, designing and constructing these tiny robots presents important engineering challenges. The complexity arises from the necessity for the robots to carry out complicated actions comparable to strolling, crawling, and steering, which generally require a mess of actuators. Conventional actuators, even when scaled all the way down to tiny dimensions, may be cumbersome and add to the general measurement of the robotic, defeating the aim of making a compact and agile system. Moreover, the usage of these standard elements usually makes these robots dearer, hindering the feasibility of deploying massive swarms, particularly in situations the place the robots may not return, comparable to in one-way missions or hostile environments.
To make extremely purposeful centimeter-scale robots sensible for widespread use, important developments are needed. One such development has just lately been proposed by a group led by researchers on the College of Pennsylvania. They’ve developed a centimeter-scale quadrupedal robotic that stroll, crawl, steer, fold, and unfold, all whereas utilizing solely a single actuator. The intelligent design shops mechanical power within the robotic’s physique to restrict the ability required of (and due to this fact the scale of) the actuator.
The approach that makes this doable, known as CurveQuad, depends on origami folds made within the physique of the robotic. The group didn’t use standard, straight-line folds, nevertheless, as an alternative opting to leverage curved creases. These curved folds retailer extra mechanical power and induce bending within the folded sheets. A comparatively small power from the actuator can start the method of unleashing that bigger, saved power. And thru cautious design, that bigger power may be utilized to maneuver the robotic in particular, helpful patterns. These properties of CurveQuad enable for very small robots to be constructed, and at a low value.
The CurveQuad technique is appropriate for mass manufacturing. The method of manufacturing a robotic is comparatively easy, as they are often constructed from just some flat sheets of fabric that fold into the ultimate three-dimensional form. Onboard electronics and the actuator may also be embedded inside these sheets.
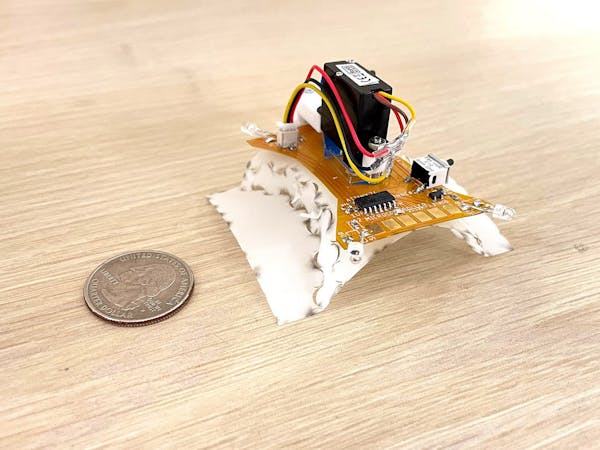
A prototype robotic was constructed utilizing the group’s methods that weighs simply eleven grams and measures eight centimeters in size. By way of the inclusion of easy curved folds, this robotic can stroll, crawl, and extra. An indication was carried out that confirmed the robotic can autonomously stroll in direction of a light-weight supply. The opportunity of creating swarms of those units was additionally proven, with the researchers demonstrating a set of 4 of those light-seeking robots in operation concurrently.
At current, the robotic can solely perform on degree floor, however the group is exploring choices that would get it engaged on sloped or tough terrain. They’re additionally investigating the opportunity of including further circuitry that would allow wi-fi communication between robots in a swarm.This tiny robotic is surprisingly succesful (📷: Sung lab)
The strolling movement of the robotic (📷: D. Feshbach et al.)
The versatile PCB features a microcontroller and lightweight sensor (📷: D. Feshbach et al.)